立命館大学 総合科学技術研究機構 深尾研究室

研究内容
- 自動運転・隊列走行
- 移動ロボット・農業ロボット
- 飛行船ロボット
- 自動車のアクティブ制御
- 非線形制御・適応制御とその応用
- コンピュータビジョンとそのロボットシステムへの応用
- 強化学習・マルチエージェントシステム
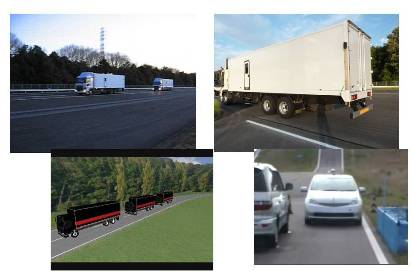
自動車の自動運転・隊列走行
自動車やトラックの自動運転や隊列走行技術の研究開発は,
日米欧などにおいて行われて来たが,特別な道路インフラを必要とするものが多かった.
しかし,米国 DARPA の Grand Challenge や Urban Challenge などのプロジェクトに
見られるように,また Google を始めとして,様々な企業が主として開発しているように,
特別な道路インフラを必要としないセンサ類を車載した自動車の自動運転に関する
研究開発が進行している.
完全自律走行が実現されるまでは,安全・快適のための運転者支援システムも
非常に重要な技術である.
現在までに,自動車の自動駐車制御に関する共同研究を日本自動車部品総合研究所と, 車載カメラによる構造推定に関する共同研究をデンソーと行っている. また,NEDO エネルギー ITS 推進事業「協調走行(自動運転)に向けた研究開発」で, 大型トラックの自動運転,隊列走行のための特に経路追従制御と車間距離制御に関する 研究開発をシミュレータやテストコース,建設中の高速道路での実車走行試験により実施し, 乗用車の自動運転や運転支援システムに関する共同研究をデンソー等と行っている.
プロジェクト成果・デモ:
最終更新:平成27年5月
現在までに,自動車の自動駐車制御に関する共同研究を日本自動車部品総合研究所と, 車載カメラによる構造推定に関する共同研究をデンソーと行っている. また,NEDO エネルギー ITS 推進事業「協調走行(自動運転)に向けた研究開発」で, 大型トラックの自動運転,隊列走行のための特に経路追従制御と車間距離制御に関する 研究開発をシミュレータやテストコース,建設中の高速道路での実車走行試験により実施し, 乗用車の自動運転や運転支援システムに関する共同研究をデンソー等と行っている.
プロジェクト成果・デモ:
関連プロジェクト・助成金
- NEDO エネルギー ITS 推進事業 (平成20~24年度)
協調走行(自動運転)に向けた研究開発
自動運転・隊列走行の制御モデルおよびシミュレータの設計
関連発表論文
学術論文,解説記事,国際会議論文-
Yuki Okafuji, Takanori Fukao, Hiroshi Inou:
Development of Automatic Steering System by Modeling Human Behavior Based on Optical Flow,
Journal of Robotics and Mechatronics, No.27, No.2, pp.136-145 (2015/4)
-
Hiroshi Inou, Takanori Fukao, Seiji Totsuka and Yuki Okafuji:
Development of Automatic Steering Control System Based on Optical Flow Model,
12th International Symposium on Advanced Vehicle Control (AVEC'14) (2014/9)
-
伊能 寛,深尾 隆則:
オプティカル・フローに着目したドライバ操舵モデル(第2報) ―自動車運転時のオプティカル・フロー・シミュレーション―
自動車技術会論文集,Vol.45, No.4, pp.711-716 (2014/7)
-
深尾 隆則,杉町 敏之:
隊列走行,
システム/制御/情報,Vol.58, No.5, pp.175-180 (2014/5)
-
伊能 寛,深尾 隆則:
オプティカル・フローに着目したドライバ操舵モデル,
自動車技術会論文集,Vol.45, No.2, pp.381-386 (2014/3)
-
Toshiyuki Sugimachi, Takanori Fukao, Takuma Ario, Yoshitada Suzuki, and Hiroki Kawashima:
Practical Lateral Control for Autonomous Platooning System of Heavy-Duty Trucks,
20th ITS World Congress (2013/10)
-
Takuma Airo, Toshiyuki Sugimachi, Takanori Fukao, and Hiroki Kawashima:
Fuzzy Inference-Based Self-Tuning of Steering Control Gains for Heavy-Duty Trucks,
20th ITS World Congress (2013/10)
-
Toshiyuki Sugimachi, and Takanori Fukao:
Development of Autonomous Platooning System for Heavy-Duty Trucks,
7th IFAC Symposium on Advances in Automotive Control (2013/9)
-
Takanori Fukao, Takashi Aoki, Toshiyuki Sugimachi, Yoshiyuki Yamada, and Hiroki Kawashima:
Preceding Vehicle Following Based on Path Following Control for Platooning,
7th IFAC Symposium on Advances in Automotive Control (2013/9)
-
青木 崇, 杉町 敏之, 深尾 隆則, 河島 宏紀:
MMACによる道路線形適応機構を有する自動操舵制御,
日本機械学会論文集 C編 Vol.79, No.802, pp.1923-1934 (2013/6)
-
有尾 拓誠,杉町 敏之,深尾 隆則,河島 宏紀:
大型トラックの自動操舵制御ゲインのファジィ推論に基づくセルフチューニング,
自動車技術会論文集,Vol.44, No.2, pp.485-490 (2013/3)
-
杉町 敏之,深尾 隆則,鈴木 儀匡:
トラックのPath Following 制御に基づく自動レーンチェンジ,
自動車技術会論文集,Vol.44, No.1, pp.193-198 (2013/1)
-
Toshiyuki Sugimachi, Takanori Fukao, Yoshitada Suzuki, and Hiroki Kawashima:
Autonomous Lane Change of Heavy-duty Trucks Based on Path Following Control,
19th ITS World Congress (2012/10)
-
Takanori Fukao:
Control Algorithms of Platooning in Energy ITS Project,
19th ITS World Congress (2012/10)
-
Takashi Aoki, Toshiyuki Sugimachi, Takanori Fukao, and Hiroki Kawashima:
Autonomous Steering Control with Adaptive Mechanism by MMAC,
SICE Annual Conference 2012 (2012/8)
-
吉田 順,杉町 敏之,深尾 隆則:
トラックのPath Following制御に基く自動運転,
日本機械学会論文集 C編 Vol.77, No.783, pp.4125-4135 (2011/11)
-
Toshiyuki Sugimachi, Takanori Fukao, and Yoshitada Suzuki:
Autonomous Lane Change of a Heavy-duty Truck Based on Path Following Control,
First International Symposium on Future Active Safety Technology Toward zero-traffic-accident (FAST-Zero'11) (2011/9)
-
深尾 隆則,杉町 敏之:
隊列走行システムのアルゴリズムの開発,
日本自動車研究所 自動車研究,Vol.32, No.10, pp.573-578 (2010/10)
-
Takanori Fukao:
Control design methods for Automatic driving of automotives,
17th ITS World Congress (2010/10)
-
Yoshitada Suzuki, Takumi Hori, Tomoyuki Kitazumi, Keiji Aoki, Takanori Fukao, Toshiyuki Sugimachi:
Development of Automated Platooning System based on Heavy Duty Trucks,
17th ITS World Congress (2010/10)
-
Toshiyuki Sugimachi, Takanori Fukao, Jun Yoshida, Yuya Hirata, Yoshitada Suzuki, Keiji Aoki:
Autonomous Driving Based on LQ Path Following Control and Platooning with Front and Rear Information,
17th ITS World Congress (2010/10)
-
Jun Yoshida, Toshiyuki Sugimachi, Takanori Fukao, Yoshitada Suzuki, Keiji Aoki:
Autonomous Driving of a Truck Based on Path Following Control,
10th Int. Symposium on Advanced Vehicle Control (2010/8)
-
岡藤 勇希,深尾 隆則,横小路 泰義,伊能 寛:
オプティカルフローに基づいた前方注視モデルの理解と応用,
第59回システム制御情報学会研究発表講演会 (2015/5)
-
吉本 達也,米田 真美,深尾 隆則:
ドライバ特性を考慮したアダプティブクルーズコントロール,
計測自動制御学会第2回制御部門マルチシンポジウム (2015/3)
-
英 峻成,深尾 隆則:
重量変化を伴うトラックの経路追従適応制御,
日本機械学会第23回交通・物流部門大会 (2014/12)
-
岡藤 勇希,深尾 隆則,伊能 寛:
オプティカルフローに基づいた自動操舵システム,
ロボティクス・メカトロニクス講演会2014 (ROBOMEC'14) (2014/5)
-
籾山 冨士男,鈴木 儀匡,杉町 敏之,深尾 隆則,景山 一郎:
自動運転トラックのカント路車線維持解析とモデリング,
2014年自動車技術会春季大会 (2014/5)
-
伊能 寛,深尾 隆則,戸塚 誠司,岡藤 勇希:
オプティカル・フロー・モデルを利用した操舵制御システムの開発,
2014年自動車技術会春季大会 (2014/5)
-
伊能 寛,深尾 隆則:
自動車運転時のオプティカル・フロー・シミュレーション,
第14回計測自動制御学会システムインテグレーション部門講演会 (SI2013) (2013/12)
-
伊能 寛,深尾 隆則:
オプティカル・フローに着目したドライバ操舵モデル,
2013年自動車技術会秋季大会 (2013/10)
-
米田 真美,杉町 敏之,深尾 隆則,河島宏紀:
トラックの隊列走行におけるシフトチェンジを考慮した車間距離制御,
ロボティクス・メカトロニクス講演会2013 (ROBOMEC'13) (2013/5)
-
杉町 敏之,有尾 拓誠,深尾 隆則,河島 宏紀,鈴木 儀匡:
車線維持制御におけるロバスト性向上技術の開発(I),
2013年自動車技術会春季大会 (2013/5)
-
山田 善之,青木 啓二,河島 宏紀,深尾 隆則,杉町 敏之,青木 崇:
隊列走行におけるトラッキング制御技術の開発,
2013年自動車技術会春季大会 (2013/5)
-
深尾 隆則,有尾 拓誠,杉町 敏之,河島 宏紀:
車線維持制御におけるロバスト性向上技術の開発(II),
2013年自動車技術会春季大会 (2013/5)
-
青木 崇,杉町 敏之,深尾 隆則,山田 善之,河島宏紀:
隊列走行における前方車追従自動操舵制御,
第11回ITSシンポジウム (2012/12)
-
杉町 敏之,深尾 隆則,鈴木 儀匡,河島 宏紀:
自動運転・隊列走行における操舵・車間距離制御アルゴリズム,
第55回自動制御連合講演会 (2012/11)
-
杉町 敏之,深尾 隆則,鈴木 儀匡,河島 宏紀:
トラックの4台隊列走行システムの開発,
ADVANTYシンポジウム (2012/11)
-
有尾 拓誠,杉町 敏之,深尾 隆則,河島 宏紀:
大型トラックの自動操舵制御ゲインのファジィ推論に基づくセルフチューニング,
2012年自動車技術会秋季大会 (2012/10)
-
有尾 拓誠,杉町 敏之,深尾 隆則,河島 宏紀:
自動運転車のファジィ推論を応用したセルフゲインチューニング,
ロボティクス・メカトロニクス講演会2012 (ROBOMEC'12) (2012/5)
-
杉町 敏之,深尾 隆則,鈴木 儀匡,河島 宏紀:
Path Followingにおける操舵制御ゲインのセルフチューニング,
2012年自動車技術会春季大会 (2012/5)
-
杉町 敏之,深尾 隆則,鈴木 儀匡:
隊列走行における隊列形成制御,
システム制御情報学会研究発表講演会 (2012/5)
-
青木 崇,杉町 敏之、深尾 隆則,河島 宏紀:
MMAC によるカント適応機構を有する自動操舵制御,
第10回ITSシンポジウム2011 (2011/11)
-
平田 祐也,杉町 敏之,深尾 隆則,鈴木 儀匡:
隊列走行における車間距離制御アルゴリズムの研究(第3報),
2011年自動車技術会春季大会 (2011/5)
-
杉町 敏之,深尾 隆則,鈴木 儀匡:
トラックのPath Following 制御に基づく自動レーンチェンジ,
2011年自動車技術会春季大会 (2011/5)
-
青木 崇,平田 祐也,杉町 敏之,深尾 隆則:
省燃費を実現する隊列走行における不確定性を考慮した車間距離制御,
システム制御情報学会研究発表講演会 (2011/5)
-
青木 崇,平田 祐也,吉田 順,杉町 敏之,深尾 隆則:
隊列走行における車両特性の不確かさを考慮した適応制御,
SICE関西支部若手研究特別発表会2011,(2011/1)
-
杉町 敏之,吉田 順,平田 裕也,深尾 隆則,鈴木 儀匡:
隊列走行における車間距離制御アルゴリズムの研究(第2報),
2010年自動車技術会春季大会 (2010/5)
-
吉田 順,杉町 敏之,深尾 隆則:
トラックの Path Following 制御に基づく自動運転,
第15回ロボティクスシンポジア (2010/3)
-
平田祐也,吉田順,杉町敏之,深尾隆則:
後方車両との車間距離利用の有無による隊列走行への影響,
SICE関西支部若手研究発表会 (2010/1)
-
深尾 隆則,吉田 順,森田 康裕:
隊列走行における車間距離制御アルゴリズムの研究(第1報)
-エネルギーITS推進事業-,
2009年自動車技術会秋季大会 (2009/10)
-
吉田 順,深尾 隆則,鶴田 義明:
後方車両との距離情報を利用した隊列走行制御,
第53回システム制御情報学会研究発表講演会 (2009/5)
-
深尾隆則,鶴田義明:
自動車の自律走行制御系設計法,
第9回SICE制御部門大会 (2009/3)
-
深尾隆則,松江武典,今西勝之:
非ホロノミック系制御に基づく自動駐車システム
第26回日本ロボット学会学術講演会 (2008/9)
-
深尾隆則,松江武典,今西勝之:
自動駐車制御システム,
計測自動制御学会制御部門大会 (2008/3)
-
松江武典,今西勝之,深尾隆則:
安全確認機能を搭載した切り返し自動駐車,
2007年自動車技術会秋季大会,(2007/10)
-
森,宮坂,深尾,足立,大須賀:
モデル規範型D*制御による軌道追従自動操舵システム,
Dynamics and Design Conference 2001 (2001/8)
最終更新:平成27年5月